文章圖片
文章圖片
【瀏覽器|DELMIA軟件弧焊仿真:機(jī)器人運(yùn)行路徑軌跡精度文件介紹與配置方法】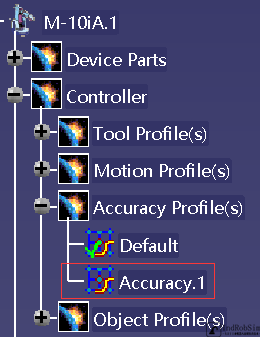
文章圖片

文章圖片
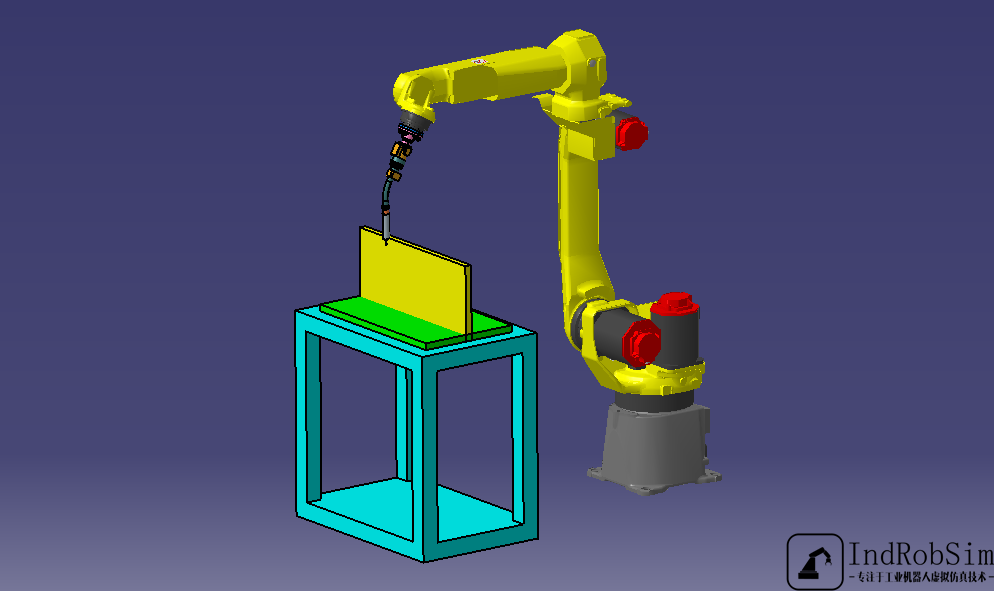
問題描述及解決方法?問題描述:前幾期介紹了DELMIA軟件自動生成機(jī)器人弧焊焊接程序的方法 , 但是機(jī)器人在仿真運(yùn)行時并不連貫流暢 , 而是會出現(xiàn)卡頓現(xiàn)象 , 這是什么原因?該如何解決呢?
成因分析:之所以出現(xiàn)卡頓現(xiàn)象 , 是因?yàn)闄C(jī)器人在運(yùn)行到除焊接起始點(diǎn)與結(jié)束點(diǎn)以外的其他自動生成的示教點(diǎn)(或目標(biāo)點(diǎn))時 , 會在示教點(diǎn)附近先減速直到準(zhǔn)確停止在示教點(diǎn)上 , 然后再啟動、加速 , 最后勻速向下一個示教點(diǎn)運(yùn)行 , 如此重復(fù)每一個示教點(diǎn) , 就會出現(xiàn)卡頓現(xiàn)象了 。
解決方法:真實(shí)的機(jī)器人遇到這種問題 , 可以通過配置機(jī)器人運(yùn)行路徑軌跡的精度數(shù)據(jù)來解決 , 如ABB機(jī)器人的區(qū)域數(shù)據(jù)(zonedata)、FANUC機(jī)器人的定位類型等 。 在DELMIA軟件中仿真運(yùn)行的機(jī)器人也可以通過配置精度數(shù)據(jù)來解決這一問題 , 這些精度數(shù)據(jù)都在機(jī)器人控制器的精度配置文件中 , 需要仿真人員根據(jù)需要進(jìn)行單獨(dú)配置 。 精度數(shù)據(jù)不只是影響機(jī)器人連續(xù)直線運(yùn)動軌跡 , 對連續(xù)曲線、連續(xù)弧線、圓周運(yùn)動影響更加突出 。 除焊接工藝應(yīng)用外 , 機(jī)器人涂膠、噴漆、滾邊、銑削、打磨、去毛刺等工藝應(yīng)用也需要配置精度數(shù)據(jù) 。
機(jī)器人運(yùn)行路徑軌跡精度文件配置?所有機(jī)器人都有構(gòu)成其控制器數(shù)據(jù)的配置文件 , 其中精度配置文件定義了有關(guān)機(jī)器人運(yùn)行路徑軌跡精確程度的數(shù)據(jù) 。
在DELMIA中打開機(jī)器人弧焊焊接虛擬仿真項目 , 將軟件切換到“Device Task Definition”模塊 。 在下方的Robot Controller工具條中點(diǎn)擊“Accuracy Profile”命令按鈕 , 然后選擇要配置路徑軌跡精度的機(jī)器人 , 彈出Accuracy Profile對話框 。
在Accuracy Profile對話框中可以新建或編輯精度配置文件參數(shù) , 各個配置項目詳細(xì)說明如下:
Name:定義機(jī)器人運(yùn)行路徑軌跡精度文件名稱 , 配置文件定義完成后該名稱會在PPR瀏覽樹中顯示 。
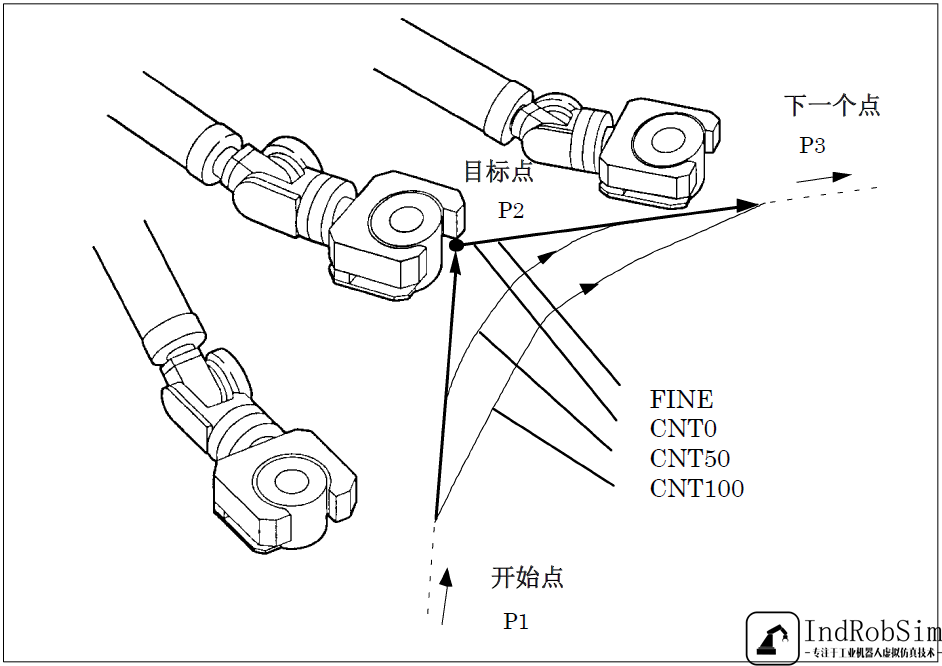
Flyby Mode:指定是否開啟飛越模式 。 當(dāng)選擇“On”時 , 飛越模式開啟 , 此時機(jī)器人運(yùn)行時只接近目標(biāo)點(diǎn) , 但不會停在目標(biāo)點(diǎn)上(即目標(biāo)點(diǎn)只是一個通過點(diǎn)) , 機(jī)器人實(shí)際的運(yùn)動軌跡取決于下方精度類型(Accuracy Type)和精度值(Accuracy Value)設(shè)定的參數(shù)值 。 當(dāng)選擇“Off”時 , 飛越模式關(guān)閉 , 機(jī)器人運(yùn)行到目標(biāo)點(diǎn)上時停止 , 即無論精度類型和精度值如何設(shè)置 , 運(yùn)動都處于點(diǎn)對點(diǎn)模式 。 一種特殊情況是飛越模式開啟后將Accuracy Value設(shè)置為0 , 這時機(jī)器人的運(yùn)動被認(rèn)為是點(diǎn)對點(diǎn)的 , 等效于飛越模式關(guān)閉 。
Accuracy Type:指定精度參數(shù)類型 。 當(dāng)設(shè)定為距離(Distance)時 , 準(zhǔn)確度值定義了以機(jī)器人TCP運(yùn)動到的目標(biāo)點(diǎn)為中心的虛擬球體的半徑 , 相當(dāng)于ABB機(jī)器人的區(qū)域數(shù)據(jù)設(shè)置為z或FANUC機(jī)器人定位類型設(shè)置為CNT 。 機(jī)器人的TCP到達(dá)該虛擬球體上的任何一點(diǎn)時 , 轉(zhuǎn)彎運(yùn)動就開始了 。 因此 , 當(dāng)距離值不為零時 , 機(jī)器人的TCP永遠(yuǎn)不會到達(dá)目標(biāo)點(diǎn)位置 。 當(dāng)設(shè)定為速度(Speed)時 , 機(jī)器人轉(zhuǎn)彎運(yùn)動程度是減速時間的函數(shù) 。 在直線運(yùn)動的情況下 , 如果精度值設(shè)置為100% , 則從減速曲線的起點(diǎn)開始直接運(yùn)動到下一點(diǎn) , 即機(jī)器人在目標(biāo)點(diǎn)處不減速 , 這會產(chǎn)生最大的轉(zhuǎn)彎半徑 。 如果精度值設(shè)置50% , 則在經(jīng)過一半的減速時間后開始向下一個點(diǎn)運(yùn)動 , 即機(jī)器人將減速到完全停止所需的一半時間 , 然后開始下一個運(yùn)動語句 。 如果精度值設(shè)置為0% , 則機(jī)器人運(yùn)動遵循標(biāo)準(zhǔn)加速/減速曲線 , 相當(dāng)于ABB機(jī)器人的區(qū)域數(shù)據(jù)或FANUC機(jī)器人定位類型均設(shè)置為FINE 。
相關(guān)經(jīng)驗(yàn)推薦










- 流氓軟件|流氓軟件完全卸載攻略,3個步驟即可完殺!親測有效百戰(zhàn)百勝
- 軟件測試|軟件測試好書推薦《高級軟件測試卷1:高級軟件測試分析師》
- 瀏覽器|瀏覽器:谷歌始終統(tǒng)治著我們的世界!
- 軟件|Redmi?旗艦新機(jī)曝光:超窄邊框一體全面屏設(shè)計,外觀很驚艷
- 軟件|iOS 上有哪些新奇 App?看看有沒有你使用過的
- 軟件|熱錢涌入,大牌押寶,工業(yè)軟件能彎道超車嗎?
- 軟件|打工人必備的軟件,今天出事了
- 軟件|蘋果IOS上最香的閱讀軟件——愛閱書香
- 軟件|常用手機(jī)偷看“不良網(wǎng)站”?如果出現(xiàn)這個頁面,你已經(jīng)被盯上了
- 軟件|標(biāo)簽打印軟件如何制作利器盒標(biāo)簽