路透社發布信息稱 , 東京大學信息學院的ISI實驗室日前發布了一則視頻 , 視頻中所展示的雙臂機器人可以在大約三分鐘的時間內完整的剝掉一根香蕉的香蕉皮而不傷害果肉 。 雖然成功率只有57% , 但是對于機器人進行“精密操作”的研究無疑意義重大 。
該研發團隊的成員Heecheol Kim、Yoshiyuki Ohmura和Yasuo Kuniyoshi采用了“深度模擬學習”的方法去訓練機器人 , 他們演示了數百次剝香蕉的動作 , 以生成足夠的數據 , 來讓機器人進行重復的學習 , 最終經過13個小時的訓練后 , 機器人成功完成了“剝香蕉”的動作 。
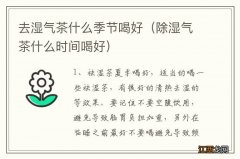
▲雙臂機器人拿起香蕉并剝皮而不壓扁里面的水果
在通過這種方法訓練機器人學習更多能力的同時 , 團隊中的Kuniyoshi認為 , 他們的這種訓練方式能夠有效的讓機器人去學習更多精細的人類動作 , 例如重復的流水線工作 , 并以此來解決日本勞動力短缺的問題 。
可以說 , 無論是穿衣還是剝香蕉 , 如今機器人能夠完成的工作變得更加精細和復雜 , 與之對應的是機器人在我們生活中的應用場景也在不斷增加 。 從照顧病人輻射到解決整個醫療行業的問題 , 從代替工人輻射到解決整個社會的生產力問題 , 這些技術的成功在未來很有可能會推動社會的進程 。 成功讓機器人完成觸摸、穿衣和剝香蕉這些動作 , 也是技術積累的外在表現 。
結語:強化學習成關鍵 , “仿人”機器人技術迎來新突破從上文中其實不難看出 , 反復的強化訓練依然是目前機器人學習的主要途徑 , 但是像“人造指尖”這種人體仿生學技術的加入 , 又為機器人的學習提供了全新的方式 。 很顯然 , “人造指尖”是目前機器人行業內獨樹一幟的存在 , 但是相對的 , 和傳統的“模擬訓練”相比 , “人造指尖”的機械結構要更精密 , 產品本身涉及的技術也更多更復雜 。
機器人不應該只是指令的載體 , 它更應該擁有和人腦比肩的智能 , 具備學習能力 , 懂得問題分析并可以執行精密的操作 。 “人造指尖”、輔助穿衣和剝香蕉這三項技術的成功恰好對應了上述的三個條件 , 并且從側面也反應了人工智能技術的推進 。 對行業來說 , 今后機器人的訓練方式 , 很可能會從原來“機械式地模仿” , 變成通過傳感器加持下的“主動學習” , 一旦發生這樣的改變 , 那機器人學習人類的進程將會大大加快 。
【機器人|機器人“仿人”技術新突破,超靈敏手指觸覺,還能剝香蕉、穿衣服!】來源:Science、Reuters
相關經驗推薦









![原神潺潺向前任務怎么做?好奇的嫣朵拉獲取方法介紹[多圖]](http://img1.jingyanla.com/220426/0P313J58-0-lp.jpg)





- 曠視科技|鎢線纜在手術機器人中的運動控制
- 三星|50倍變焦+驍龍870+三星HM2,跌至1999元,“跳水價”1300元離場
- 北京市|這4種生活小家電,看似“多此一舉”,幸福感很強!你用過幾種?
- 機器人|別讓低俗內容扼殺你的靈商
- 智能手機|鴻蒙系統手機,充電時居然還能下“櫻花雨”太美了!不會用可惜了
- 紅米手機|vivo量產5800mAh新機,定名“vivoT2”!性價比足了
- 5G|5G超清視話,做什么才會更“香”
- 蘋果|速度大提升!蘋果35W充電器出爐,這次充電又“超速”了?
- iPhone|買完不后悔系列,目前這4款手機最值得買,幾乎“零”差評
- 筆記本|疫情形勢依舊嚴峻,做好家電“硬儲備”