
文章圖片
文章圖片
文章圖片
人工智能(Artificial Intelligence) , 就像長生不老和星際漫游一樣 , 是人類最美好的夢想之一 。
2012年6月 , 《紐約時報》披露了Google Brain項目 , 吸引了公眾的廣泛關注 。 這個項目是由著名的斯坦福大學的機器學習教授Andrew Ng和在大規模計算機系統方面的世界頂尖專家Jeff Dean共同主導 , 用16000個CPU Core的并行計算平臺訓練一種稱為“深度神經網絡”(DNN , Deep Neural Networks)的機器學習模型在語音識別和圖像識別等領域獲得了巨大的成功 。 該網絡內部有10億個節點 , 雖說不能與有著150億個神經元的人腦相提并論 , 但也確確實實在AI的路上踏出了堅實的一步 。
項目負責人Andrew稱:“我們沒有像通常做的那樣自己框定邊界 , 而是直接把海量數據投放到算法中 , 讓數據自己說話 , 系統會自動從數據中學習 。 ”就比如圖1中的這只貓 , 在訓練模型的時候我們不會告訴機器說這是一只貓 , “貓”這個概念其實是由機器自己領悟或者發明 。
圖1Google Brain項目
2013年4月 , 《麻省理工學院技術評論》雜志將深度學習列為2013年十大突破性技術之首 。 如今 , 深度學習這個名詞也隨著自動駕駛的熱潮 , 而為越來越多的人所知曉 。
那么 , 什么是深度學習 , 為什么要引入深度學習以及它在自動駕駛環境感知中究竟能發揮何種作用呢?
深度學習是使用了深度神經網絡的機器學習 , 一般指根據已知的海量數據通過訓練出一個多層網絡結構 , 從而實現對未知數據的分類或者回歸 。
首先解釋一下什么是神經網絡 。 神經網絡是一種模仿動物神經網絡行為特征 , 進行分布式并行信息處理的算法數學模型 。 這種網絡依靠系統的復雜程度 , 通過調整內部大量節點之間相互連接的關系 , 從而達到處理信息的目的 。 在神經網絡中有一些基本的術語 , 如圖2所示:
【深度學習|深度學習在環境感知中的應用】
圖2神經網絡結構圖
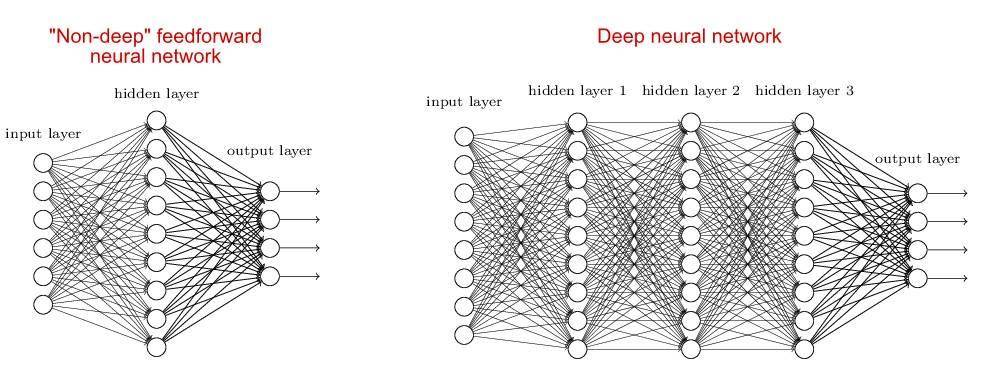
神經網絡與深度神經網絡的區別在于上圖中的隱藏層層數 , 通常三層或三層以上隱藏層的網絡叫做深度神經網絡 , 圖3中左邊為神經網絡 , 右邊即為深度神經網絡 , “深”體現在隱藏層層數:
圖3神經網絡和深度神經網絡
在神經網絡與深度神經網絡之間 , 深度神經網絡要優于神經網絡 , 因為對某個特定問題而言 , 隱藏層越多 , 精確度越高 。 在其他許多任務和領域中同樣可以觀察到這個現象 。
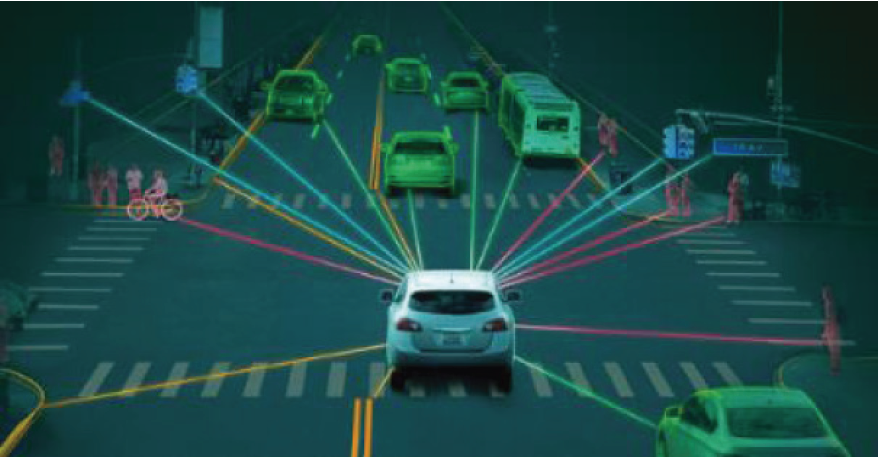
了解了深度學習的一些概念后 , 我們來聊聊為啥在自動駕駛環境感知技術中 , 我們需要引入深度學習 。
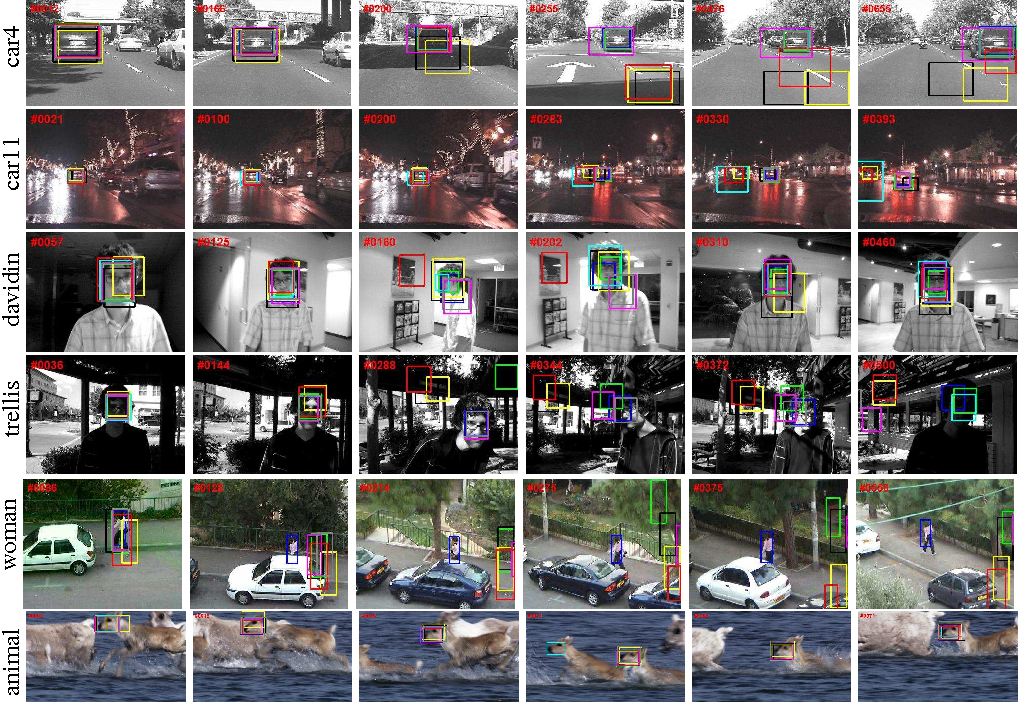
在環境感知中有許多核心技術 , 這里以目標檢測為例 。 傳統的目標檢測與識別算法分為三部分:目標特征提取、目標識別以及目標定位 。 其中 , 最典型的算法就是基于組件檢測的DPM(Deformable Part Model)算法 。 該算法的步驟是先產生多個模板 , 整體模板以及不同的局部模板 , 然后拿這些不同的模板和輸入圖像“卷積”產生特征圖 , 接著將這些特征圖組合形成融合特征 , 最后對融合特征進行傳統分類 , 回歸得到目標的位置 。 這個算法的優點在于它簡單直觀 , 運算較快 。 但其缺點則大大制約了環境感知技術的發展 , 尤其是它的激勵特征是人為設計的 , 這種方法不具有普適性 , 因為用來檢測人的激勵模板不能拿去檢測小貓或者小狗 , 所以在每做一種物件的探測的時候 , 都需要人工來設計激勵模板 , 為了獲得比較好的探測效果 , 需要花大量時間去做一些設計 , 工作量很大 。
相關經驗推薦










- 華為|二手機還是值得入手,性價比這塊,它永遠排在最后
- 安防|微波雷達報警感應模塊,雷達報警器技術應用,人體存在感應方案
- AMD|曝蘋果首款 AR/VR 頭顯在年底發布?價格上或將極其昂貴!
- 小米科技|?小米在手感上,都是玻璃做的,沒啥實質區別
- CPU|開售將近2個月!驍龍888+66W閃充,現在看依舊值得買
- 新華社|圍繞屏幕和性能!深度對比開學季三款16英寸全能本應該怎么選?
- 5G|現在5G,以及未來的6G,通訊水平完全可以達到設備內部的水平
- 曲面屏|拿著五六千的工資,下班就躺在床上玩手機?優秀就是與別人不一樣
- 四川長虹|以前1000多塊錢可以買到高端顯卡,現在只能買到二手低端顯卡
- 刷臉支付|現在還是用米6,現在這部米6是出了一年再買的,因為剛出買不到