由于傳統目標檢測算法主要基于人為特征提取 , 對于更復雜或者更高階的圖像特征很難進行有效描述 , 限制了目標檢測的識別效果 。 因此 , 通過集聯多層神經網絡形成很深的隱藏層從而提取出豐富特征的深度學習方法也就成為了環境感知技術中的“新寵” 。
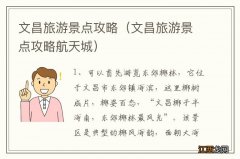
在深度學習中 , 人們把特征提取和分類合到一起 , 這兩部分都是通過以目的為驅動的訓練的方式 。 這時 , 其實我們不清楚到底訓練出來的這個特征是什么樣的一個結構 , 或者是具有什么樣的物理意義 , 因為它完全是大數據訓練出來的 。 這就相當于變成了一個黑盒子 , 但是這個過程在一定程度上是以目的為驅動 , 如果數據量足夠的話 , 它會訓練出來在一定程度上表現這個物體最好的特征 。 因此如果數據量足夠大 , 而且網絡結構也相對合理 , 其準確率可以達到99.9%以上 , 而傳統的視覺算法檢測精度的極限在93%左右 。 傳統機器學習與深度學習的分類對比如圖4:
圖4機器學習與深度學習在分類問題的對比
我們了解到深度學習的優勢后 , 自然會將其應用在實際問題中 。 接下來本文將就深度神經網絡在汽車環境感知中的環境物體檢測、語義分割和目標跟蹤等核心技術中的應用展開介紹 。
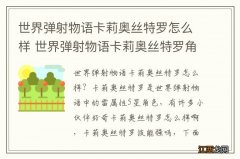
環境物體檢測:如圖5所示 , 自動駕駛待檢測的環境物體包括本車周圍的機動車、行人、騎車人、車道線、路面標識、路側標識、紅綠燈等具有形狀特征的物體 。 傳統物體的識別一般包括3個步驟:1)似物性區域提取;2)目標特征提取;3)目標分類器設計 。 第1步是指從大幅圖像(或者點云)中提取出局部的感興趣區域 , 以降低處理數據的總量;第2步一般由工程師手動構造 , 再由第3步結合經典的機器學習分類器AdaBoost或SVM來實現物體的檢測 。
與之不同 , 深度神經網絡(DNN)可自動學習特征 , 而不需工程師手動設計特征 , 簡化了介入難度 , 提升了檢測性能 。 所涉及的傳感器主要包括攝像頭和激光雷達 , 前者僅輸出高分辨率的二維圖像 , 后者輸出帶有深度信息的三維點云 , 遠距離區域點云比較稀疏 。
圖5自動駕駛場景的物體檢測示意
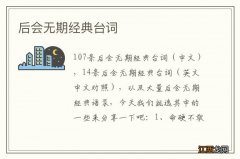
語義分割:語義分割是計算機視覺中的基本任務 , 在語義分割中我們需要將視覺輸入分為不同的語義可解釋類別 。 語義的可解釋性 , 即分類類別在真實世界中是有意義的 。 例如 , 我們可能需要區分圖像中屬于汽車的所有像素 , 并把這些像素涂成藍色 , 如圖6 。
圖6語義分割后的場景
在深度學習統治計算機視覺領域之前 , 有隨機森林、Texton Forest等方法來進行語義分割 。 深度學習的方法興起以后 , 在圖像分類任務上取得巨大成功的卷積神經網絡同樣在圖像語義分割任務中得到了非常大的提升 。 最初引入深度學習的方法是patch classification方法 , 它使用像素周圍的區塊來進行分類 , 由于使用了神經網絡中使用了全連接結構 , 所以限制了圖像尺寸和只能使用區塊的方法 。 2014年出現了Fully Convolutional Networks (FCN) , FCN推廣了原有的CNN結構 , 在不帶有全連接層的情況下能進行密集預測 。 因此FCN可以處理任意大小的圖像 , 并且提高了處理速度 。 后來的很多語義分割方法都是基于FCN的改進 。
目標跟蹤:目標跟蹤是指在給定場景中跟蹤特定感興趣對象或多個對象的過程 。 傳統上 , 它在視頻和現實世界的交互中具有應用 , 其中在初始對象檢測之后進行觀察 。 現在 , 它對自動駕駛系統至關重要 , 例如優步和特斯拉等公司的自動駕駛車輛 。
物體跟蹤方法可以根據觀察模型分為兩類:生成方法和判別方法 。 生成方法使用生成模型來描述表觀特征并最小化重建誤差以搜索對象 , 例如PCA 。 判別方法可用于區分對象和背景 , 其性能更加穩健 , 逐漸成為跟蹤的主要方法 。 判別方法也稱為檢測跟蹤(Tracking-by-Detection) , 深度學習屬于這一類 。 為了通過檢測實現跟蹤 , 我們檢測所有幀的候選對象 , 并使用深度學習從候選者中識別所需對象 。 可以使用兩種基本網絡模型:堆疊式自動編碼器(SAE)和卷積神經網絡(CNN) 。 其追蹤對象如圖7所示 , 不同的對象在不同時刻都被識別并鎖定 。
相關經驗推薦












- 華為|二手機還是值得入手,性價比這塊,它永遠排在最后
- 安防|微波雷達報警感應模塊,雷達報警器技術應用,人體存在感應方案
- AMD|曝蘋果首款 AR/VR 頭顯在年底發布?價格上或將極其昂貴!
- 小米科技|?小米在手感上,都是玻璃做的,沒啥實質區別
- CPU|開售將近2個月!驍龍888+66W閃充,現在看依舊值得買
- 新華社|圍繞屏幕和性能!深度對比開學季三款16英寸全能本應該怎么選?
- 5G|現在5G,以及未來的6G,通訊水平完全可以達到設備內部的水平
- 曲面屏|拿著五六千的工資,下班就躺在床上玩手機?優秀就是與別人不一樣
- 四川長虹|以前1000多塊錢可以買到高端顯卡,現在只能買到二手低端顯卡
- 刷臉支付|現在還是用米6,現在這部米6是出了一年再買的,因為剛出買不到