
文章圖片

文章圖片
文章圖片
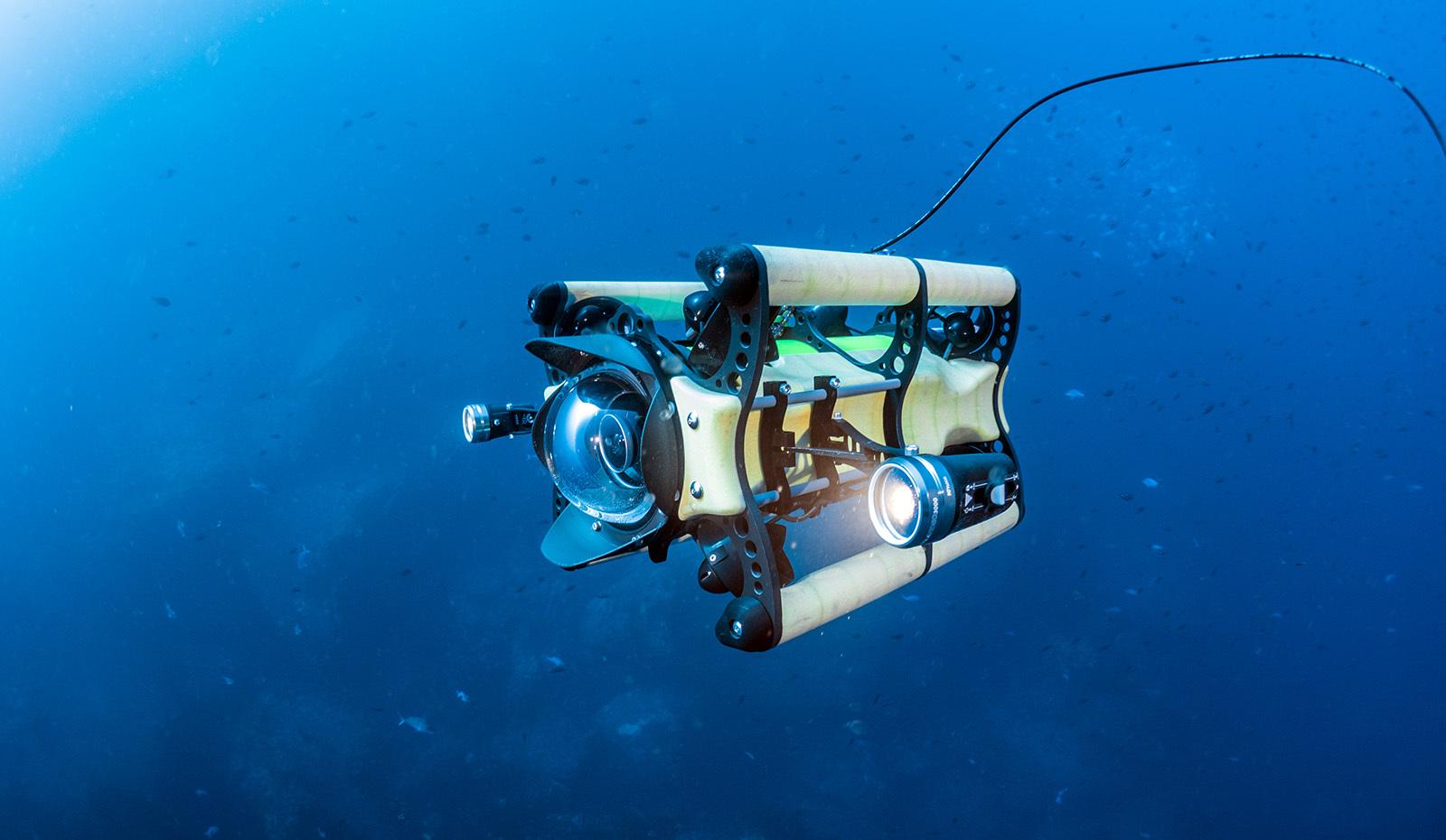
科學(xué)家評(píng)估了游泳池、魚缸和海洋中的聲學(xué)調(diào)制解調(diào)器 。 該系統(tǒng)首先在水箱和水池中進(jìn)行評(píng)估 , 以在受控條件下測(cè)試調(diào)制解調(diào)器 。 由于封閉的配置、堅(jiān)硬的墻壁和較淺的深度 , 這些環(huán)境促進(jìn)了多徑反射 , 近似于在公海部署中觀察到的干擾類型 。 科學(xué)家在開闊的海洋中測(cè)試了整個(gè)系統(tǒng) , 潛水員遠(yuǎn)程調(diào)整魚的狀態(tài)并將其導(dǎo)航到復(fù)雜水下環(huán)境中的興趣點(diǎn) 。 在三天的時(shí)間里進(jìn)行了六次潛水 , 探索斐濟(jì)索莫索莫海峽 。
該位置提供了具有不同潮汐條件的眾多珊瑚礁環(huán)境 , 允許在可以研究海洋生物相互作用和珊瑚礁生物群落的現(xiàn)實(shí)條件下評(píng)估索菲 。 機(jī)器人在每次潛水期間進(jìn)行了約四十分鐘的連續(xù)觀察 , 在平均深度和最大深度十八米的情況下總共進(jìn)行了約二百四十分鐘的受控探索 。 科學(xué)家在淺海水域進(jìn)行了另外九十分鐘的預(yù)備游泳測(cè)試 , 以測(cè)試控制系統(tǒng)、通信和視頻記錄 。
所有這些測(cè)試都評(píng)估了索菲的仿生驅(qū)動(dòng)的有效性以及用于遠(yuǎn)程控制的聲學(xué)通信接口的可用性 。 操作員和索菲之間的距離通常在一到十米之間 , 兩名或多名潛水員使用、佳能和相機(jī)在幾米的距離內(nèi)記錄了機(jī)器人沿著珊瑚礁和跟隨其他魚的軌跡 。 在五次潛水中進(jìn)行了定性觀察 , 在此期間索菲探索了珊瑚礁環(huán)境 。 在每次潛水開始時(shí)調(diào)整磁力重量以獲得中性浮力 , 然后通過聲學(xué)調(diào)制解調(diào)器連續(xù)操作機(jī)器人 。 控制器和機(jī)器人之間的距離是變化的 , 以了解有效的通信范圍 。
這條魚被引導(dǎo)穿過珊瑚礁 , 盡可能接近有趣的環(huán)境特征和海洋生物 。 這種潛水提供了對(duì)索菲在受限和非受限區(qū)域的游泳能力、聲學(xué)通信可靠性以及索菲對(duì)附近魚類的影響的定性觀察 。 考慮到設(shè)計(jì)約束 , 科學(xué)家設(shè)計(jì)了一種調(diào)制方案 , 該方案可以在微控制器上的軟件中有效實(shí)現(xiàn) , 同時(shí)仍對(duì)多徑效應(yīng)和多普勒頻移具有魯棒性 。 它使用基于脈沖的頻移鍵控和利用算法和自定義動(dòng)態(tài)峰值檢測(cè)算法的計(jì)算效率高的軟件定義解調(diào)方法 。
所選參數(shù)支持兩千零四十八條不同的消息 , 數(shù)據(jù)速率為二十位每秒時(shí)每秒一條消息 。 期望的魚狀態(tài) , 編碼為十六位字 , 每秒從控制器傳輸一次 。 每個(gè)命令描述了魚的期望狀態(tài) , 包括尾部振蕩頻率、振蕩幅度、俯仰或深度、偏航和視頻記錄 。 此外 , 一次潛水專門用于在基線深度約七米的海底進(jìn)行定量游泳測(cè)試 。 研究人員安裝了幾根預(yù)先測(cè)量好的繩索來定義參考體積于測(cè)量和拍攝機(jī)器人直線游泳、右轉(zhuǎn)、左轉(zhuǎn)、上潛和下潛的能力 。
并對(duì)每種能力進(jìn)行了三次試驗(yàn) 。 在所有試驗(yàn)中 , 推力設(shè)置為最大 , 波動(dòng)頻率設(shè)置為中等 。 對(duì)于右轉(zhuǎn)和左轉(zhuǎn) , 俯沖飛機(jī)設(shè)置為空檔 。 對(duì)于向上或向下游泳 , 偏航設(shè)置為中性 。 偏航和俯仰對(duì)于直線游泳都是中性的 。 在每次試驗(yàn)開始時(shí) , 潛水員將魚重新定位到參考體積的一個(gè)邊界平面中心的起始位置 , 然后在不推動(dòng)魚的情況下釋放魚 。 這位潛水員也在試驗(yàn)期間做筆記 。
【機(jī)器人|控制器和機(jī)器人之間的距離是變化的,以控制有效的通信范圍】第二名潛水員從起始位置指揮所需的魚群狀態(tài) 。 另外兩名潛水員從側(cè)面和頂部拍攝了試驗(yàn) , 站立或漂浮在參考體積的邊界 。 在所有會(huì)話中 , 潛水員接口模塊使用二十每秒的比特率每秒傳輸一次所需的魚狀態(tài) 。 通過記錄發(fā)送器和接收器的命令日志 , 可以提取索菲成功接收和執(zhí)行命令的百分比 。 此外 , 關(guān)于可達(dá)到的通信距離、真實(shí)世界障礙物對(duì)傳輸可靠性的影響、環(huán)境噪聲的影響以及系統(tǒng)對(duì)周圍生物的影響的定性觀察是制成 。
相關(guān)經(jīng)驗(yàn)推薦












- 紅米手機(jī)|紅米K50和realmeGT大師探索版,哪一個(gè)值得買?他們有什么不同?
- 電源管理|ddr5內(nèi)存和ddr4內(nèi)存的區(qū)別有多大?看完你就知道了
- 英特爾|戴爾 XPS 15 和 XPS 17 2022 更新采用 12 代英特爾芯片推出
- 水下機(jī)器人|控制水下機(jī)器人浮力的幾種系統(tǒng)的介紹
- 小米手機(jī)|新買來的小米手機(jī),這7個(gè)地方一定要設(shè)置,不然會(huì)造成手機(jī)卡頓和不安全
- 榮耀|性能只是表面現(xiàn)象,真正需要的還是拍照和觀影,透過新機(jī)觀本質(zhì)
- 榮耀magic|榮耀 magic4pro和一加10pro之間,該如何選?
- 主板|全世界都關(guān)注深圳復(fù)工,而他們?cè)诩揖湍苎邪l(fā)機(jī)器人
- gcc|艾利和發(fā)布真無線耳機(jī)AKUW100,主打獨(dú)立DAC與自研平衡電樞單元
- 青海|展廳展館機(jī)器人,打造智能化無人值守展廳!