文章圖片
億佰特具有完整的Modbus與CAN系列的設備體系 , 但是對于選型的用戶來說 , 如何確定自己在工業現場或其他需求的情況下選擇適合自己的通信協議設備 , 卻是一個難題 , 本文 , 針對億佰特系列設備選型的基礎上 , 進行CAN與Modbus兩種通信協議的區分 , 旨在進一步讓客戶選擇適合自己所需應用場景的產品 。
首先 , 我們先簡單的了解一下 , CAN與Modbus兩種通信協議 。
一、定義與概述CAN總線是一種由Bosch公司在1980年代提出的總線型通信協議 , 其核心是基于物理層和數據鏈路層的設計 。 CAN本身并不包含應用層定義 , 但可以通過如CANopen、DeviceNet、J1939等上層協議進行擴展 。 其設計初衷是用于實時性要求高的嵌入式系統 , 如汽車電子等 。
【CAN與Modbus的主要區別「幀結構、拓撲、訪問機制、應用」】Modbus協議則是一種由Modicon公司提出的應用層通信協議 。 它可以運行在不同的物理層之上 , 包括串口通信(Modbus RTU/ASCII)和以太網(Modbus TCP) 。 Modbus協議以其簡單性、開放性和通用性廣泛應用于PLC、變頻器、儀表和SCADA系統之間的通信 。
總之 , CAN是低層通信協議 , Modbus是高層應用協議 。
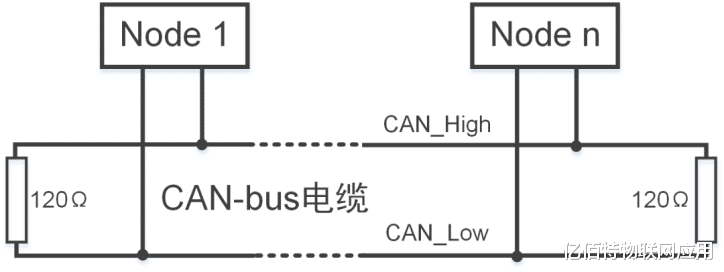
二、物理層與拓撲2.1傳輸介質與布線
CAN:使用差分雙絞線(CAN_H/CAN_L) , 總線兩端需120?Ω終端電阻 。
Modbus RTU:通常也是差分雙絞線(RS485) , 在較低速率下可覆蓋約1200?m , 亦需終端電阻 。
Modbus TCP:走標準以太網(Cat5/Cat6) , 可復用現有網絡基礎設施 。
2.2節點數量與網絡拓撲
CAN:可支持約110個節點(取決于收發器負載) , 所有節點平級“對等”接入 。
Modbus RTU:RS?485每條總線最多32個設備(取決于負載) , 采用主?從架構 。
Modbus TCP:節點數量僅受以太網交換機端口數及網絡規模限制 。
三、數據鏈路層與訪問機制3.1總線訪問控制
CAN:在比特層實現CSMA/CR(載波監聽多路訪問加碰撞解決) , 通過標識符ID仲裁 , ID值越低優先級越高 , 實現確定性訪問 。
Modbus:由主站發起所有通信 , 輪詢各從站并依次收發 , 通信時延受輪詢間隔與設備數量影響 。
3.2錯誤檢測與處理
CAN:硬件級CRC校驗、比特填充檢查、應答槽與自動重傳 , 保證幀完整性與可靠性 。
Modbus:RTU模式使用CRC?16 , ASCII模式使用LRC , 錯誤超時與重試邏輯需由應用軟件/固件自行實現 。
四、幀結構與載荷4.1 CAN幀
標識符與優先級:標準幀11位或擴展幀29位ID , 用于升序仲裁 。
載荷:Classical CAN最多8?字節;CAN?FD最多64?字節 。
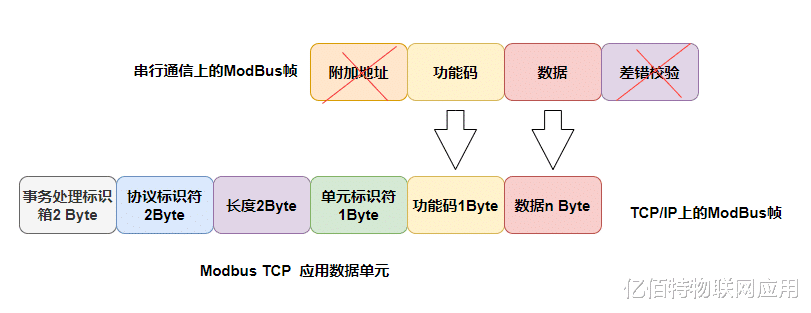
4.2 Modbus幀
地址與功能碼:1?字節設備地址+1?字節功能碼+數據+2?字節CRC(RTU) 。
載荷長度:RTU模式下最多252?字節;TCP模式下受以太網包長限制 , 可視為“無限制” 。
五、速率與距離權衡CAN:最高1?Mbps(≤40?m);距離越長需降速(如500?m時125?kbps) 。
Modbus RTU:常見9600–115200?bps;≤100?kbps時可達約1200?m 。
Modbus TCP:可支持100?Mbps或1?Gbps , 受以太網硬件限制 。
六、典型應用CAN:汽車內部網絡、多軸機器人、醫療設備等要求確定性控制場景 。
Modbus:PLC與I/O通訊、SCADA遙測、能源管理與樓宇自動化等場景 。
億佰特具有完整的Modbus與CAN系列的設備體系:
CAN系列設備可參考:ECAN系列設備產品 , 如ECAN-E01 , ECAN-W01 , ECAN-S01等等 。
Modbus系列設備可參考:遠程IO系列設備 , 如分布式IO模塊系列產品 , MA01串口IO模塊系列產品 , 溫度采集模塊ME31系列產品 。
推薦閱讀















- 構建安全防線:卡巴斯基網絡免疫與AI安全雙輪驅動
- 本末科技完成數億元B輪及B+輪融資,加速機器人與直驅技術產業化落地
- 質感與色彩的雙重暴擊!vivo S30 Pro mini顏控別錯過
- 半導體晶圓廠與數據中心,都很缺人
- 6.67英寸屏幕+三麗鷗萌趣:vivo S30外觀的視覺與觸感體驗
- 智能家電重塑家庭情感與互動新紐帶,讓家人解脫束縛
- DPU與GPU ,邊緣AI怎么選?
- 英特爾Nova Lake將采用混合圖形引擎:渲染與解碼并非同一家
- 三星將與汽車芯片制造商共同開發下一代車載半導體技術
- 超級干貨!開機電路原理與功能詳解