文章圖片

文章圖片
文章圖片
文章圖片
文章圖片

文章圖片
文章圖片

文章圖片

不圓 發自 凹非寺
量子位 | 公眾號 QbitAI
一條人形機器人發瘋的視頻在網上火了 , 視頻中快遞盒子亂飛 , 場面一度十分抓馬 。
研究人員:希望是一場幻覺 。
視頻中“發瘋”的機器人是今年機器人格斗的美國冠軍DeREK(原型為宇樹機器人G1) , 而抱著頭的這位 , 是該機器人團隊REKrobot的CEO兼機器人格斗手Cix 。
看看他們在贏得比賽時意氣風發的樣子 , 估計也想象不到會發生這樣的事 。
關于DeREK“發瘋”的技術原因 , Cix是這樣解釋的:我們啟用了全身策略 , 但機器人的雙腳沒有接觸地面 。
簡單地說 , 被吊起來的人形機器人進入了“行走模式” , 但沒有識別到腳下的路 , 才導致了這次失控 。
不過 , 網友們關心的顯然是另一方面:為什么要離那么近才能摁停止按鈕?它需要一個遠程無線的緊急制動!
更詳細的解釋網友們關心的遠程緊急制動其實是存在的——只是不管用而已 。
為什么會不管用?Cix沒有說出原因 , 但詳細解釋了整個過程:
DeREK的最初政策設計上不該出現這種情況 , 文檔里也寫明懸掛狀態下可運行 。
問題在于最終狀態自動恢復成了行走模式 。
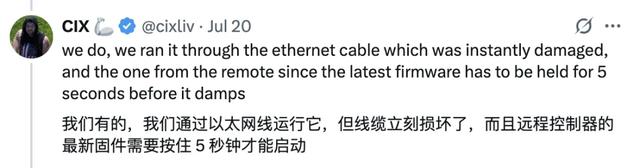
通過網絡代碼強制終止未果 , 他們配發的無線電急停裝置現在需要5秒才能生效 。
最后直到以太網電纜松脫 , 系統才真正停止 。
而5秒 , 對于緊急制動來說 , 可是會要命的 。
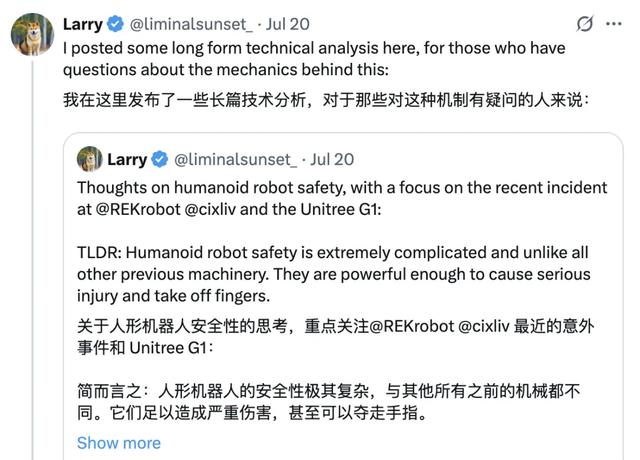
然而 , 雖然Cix自己沒找到原因 , 有網友對這件事情作出了深刻的思考 , 回答了以下幾個問題:
1、為什么無法關機或移除電池?
電池從機器人身體的側面安裝 , 位于機械臂后面 , 在機器人失去控制時 , 靠近這個區域將極其危險 。
并且 , 電池固定在身體上 , 關閉它需要按住電源按鈕兩秒鐘 , 即使從安全距離用棍子操作也難以實現 。
此外 , 電池本身的BMS按鈕可能僅由一款通用微控制器驅動 , 其軟件設計僅滿足基礎功能需求 , 并非用于緊急停止(E-Stop) 。 它很可能缺乏嚴格的安全設計 , 容易導致以下問題:按鈕失靈、物理損壞或軟件故障 , 從而在緊急情況下無法切斷電池電源 。
2、為什么不能自己對抗機器人?
機器人的電機非常強勁 。 如果有所準備 , 或許能強行停住一個電機 , 但肯定沒法同時停住多個 。 每個電機的扭矩高達120至160牛米 , 比全速運轉的大功率3類電動自行車還要強 。 而且 , 越靠近電機軸心 , 扭矩越大 。
一旦電機全力運轉時 , 肢體被夾在機身和機械臂的關節處 , 可能會造成極其嚴重的傷害——如果再加上慣性沖擊 , 這股力量足以切斷手指 , 甚至傷及骨頭 。
3、為什么不能通過其他方式切斷電源?
由于電機慣性和高制動力 , 在失控操作期間 , 電機可能會將電能反送到總線 。
如果拔掉電源 , 或BMS上的充電保護觸發 , 由于電池無法吸收的過電壓 , 所有電機和計算機電源可能會永久損壞 。 希望為電池添加硬件切斷的用戶應該了解這一風險 。
DeREK的緊急制動系統搭載了一臺基于Rockchip RK3588 CPU的ARM Linux電腦(未經過可靠性或實時性評估) , 并可選配NVIDIA Jetson模塊 。 這些計算機由電池電源通過轉換器供電 , 且需要一定時間啟動 。 如果計算機系統斷電 , 將導致所有控制功能失效(具體行為取決于執行器在通信中斷時的預設策略) 。
機器人的核心控制始終由Rockchip處理器和宇樹科技(Unitree)的閉源軟件掌控 。 在EDU版本中 , 用戶可以通過外部計算機或NVIDIA Jetson向Rockchip系統發送自定義指令——該系統應該內置了 RS485 協議轉換器 , 用于與電機通信 。
但用戶無法獲得Rockchip系統的root訪問權限或更改其上運行的軟件 。
4、為什么不能在計算機上實現緊急制動?
如果發生軟件故障 , 在計算機上實現的任何緊急停止程序可能會被無意中忽略 。
從通信方式的角度來講 , DeREK似乎通過配套遙控器使用Wi-Fi和/或藍牙進行控制 。 但必須指出 , 這兩種通信方式完全不適合用于安全關鍵控制系統——信號干擾極易導致失控 。
舉個簡單例子:筆記本電腦的USB 3.0接口都會因干擾而影響2.4GHz無線鼠標的性能 , 更何況是復雜的機器人控制系統?
問題在于 , 急停(E-Stop)、進入阻尼模式以及退出開發者模式等關鍵操作 , 都需通過無線遙控器來完成 。 令人擔憂的是 , 當無線信號中斷時 , 系統將如何響應目前尚不明確 。
5、為什么不能編程 , 讓它斷開控制器時關閉?
若通信中斷觸發急停 , 機器人很可能會突然關機并隨機傾倒 , 考慮到其自重 , 這本身就是安全隱患 。 并且 , 在系統完全停止前 , 很可能存在一段失控時間窗口 , 期間機器人可能出現異常動作 。
如果控制器斷開連接 , 操作者將失去對機器人的所有控制 , 包括啟用或禁用任何安全功能或錯誤代碼 。
在開發者模式下 , 開發者需對發送給機器人的所有指令承擔全責 , 直至Rockchip系統收到退出開發者模式的指令 。 開發者必須自行建立網絡通信 , 最關鍵的是 , 必須制定通信中斷時的安全協議 。
雖然不清楚本次事件中DeREK的具體設置 , 但據稱該協議不會因通信中斷而觸發停機 。
6、為什么不能通過軟件限制電機可用的力來降低這種風險?
簡單地說 , 機器人在正常運作時需要執行器提供全力輸出才能保持平衡 。 如果限制峰值力量輸出 , 機器人將喪失行走能力 。
想想當你在艱難徒步中過度使用肌肉時的情形:隨著肌肉疲勞導致可用峰值力量下降 , 你可能會因失去平衡余量而意外跌倒 。 下次運動時 , 不妨特別留意肌肉的受力狀態 。
7、最后的建議
這位網友認為 , 一個良好的安全解決方案應該是多步驟的 。
除去操作環境安全及個人安全方面的建議 , 對機器人自身的安全系統設計 , 大致可分為以下幾點:
執行器和電池管理系統應至少符合PL(d) 或ASIL-D等級的安全標準 , 且執行器應具備帶外(OOB)硬件安全輸入; 商用網絡、計算機、線纜等不得用于安全關鍵系統; 即使是非正式項目 , 也應遵循安全開發流程 , 包括持續測試、故障模式分析和單點故障防護工作; 使用AI制動目前難以認證 , 因此重點應放在監控和緊急切斷系統上 。不過 , 該網友也表示 , 以上并非專業工程或安全建議 , 實際應用請咨詢認證專家 。
該網友對機器人安全性的看法獲得了一致好評:
不是第一次“失控”機器人“發瘋”的現象也引起了不少網友的恐慌 , 以及一些科幻的猜想 。
畢竟DeREK是個“格斗機器人” , 很難想象這種事情如果發生在一個更小的空間里 , 會是個多讓人棘手的狀況 。
畢竟 , 5秒的時間對緊急制動確實有些過長 。
其實這并不是REXrobot第一次出狀況 , 在5月份的時候 , 還是Cix , 就有機器人“突然”摔倒的問題 。
有趣的是 , 在那個時候就有人問過機器人緊急制動的事情 , Cix的回答和這次別無二致 。
有網友建議Cix做一次詳細的事后分析 , 而不是借著這個視頻的東風馬上轉向融資——好像這件事本身就是為了炒作那樣 。
對此 , Cix語意不詳地回復:機器人格斗 。
參考鏈接:[1
https://www.reddit.com/r/robotics/comments/1m4mjmj/a_humanoid_robot_completely_lost_his_mind_derek/[2
https://x.com/cixliv/status/1946648610940367008[3
https://x.com/liminalsunset_/status/1946820928224231764[4
https://x.com/REKrobot
— 完 —
量子位 QbitAI · 頭條號
【突然發瘋!人形格斗冠軍機器人凌空回旋踢,架子都干翻】關注我們 , 第一時間獲知前沿科技動態簽約
推薦閱讀














- 華為Mate80突然曝光:外觀和配置進一步確認,或10月正式發布
- 蘋果突然宣布:8 月 9 日起,關閉這家 Apple Store
- 魅族22突然官宣:等窄四等邊+白面板,下個月發布
- vivo打響“價格戰”,從3399元跌至2379元,國補后突然變香了
- 為什么手機屏幕會突然失靈?可能是這個設置惹的禍
- 宇樹科技發布第三款人形機器人Unitree R1:起售價3.99萬元
- 紅米新機突然入網:1.5K屏+90W快充,八月份發布
- 華為突然上架新機,麒麟芯片+512GB+5600mAh+衛星通信,售價感人
- 英偉達突然宣布,恢復銷售H20芯片,中方回應耐人尋味!
- 華為新機突然開啟預售:麒麟9010S+鴻蒙5.1,旗艦體驗4199元起