宇樹機器人“撞人逃逸”火到國外,王興興回應:下次不遙控了
文章圖片
文章圖片
文章圖片

文章圖片

文章圖片

文章圖片

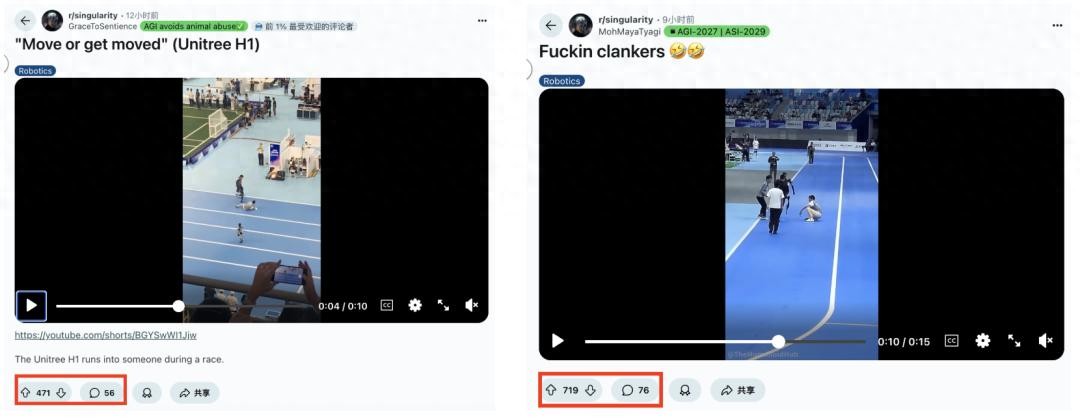
好家伙 , 宇樹機器人“肇事逃逸”這瓜 , 在國外都好火?。 ?
油管、Reddit、X上這個片段都在瘋傳ing , 還有不同角度版本 , 全世界全方位圍觀 。
大家都很擔心 , 又有人類被機器人傷害到了 。
它甚至都沒有停下來確認人類是否OK , 太典了 。
這已經違反阿西莫夫的機器人原則了:第一條 , 不得造成傷害 , 否則將立刻被“摧毀” 。
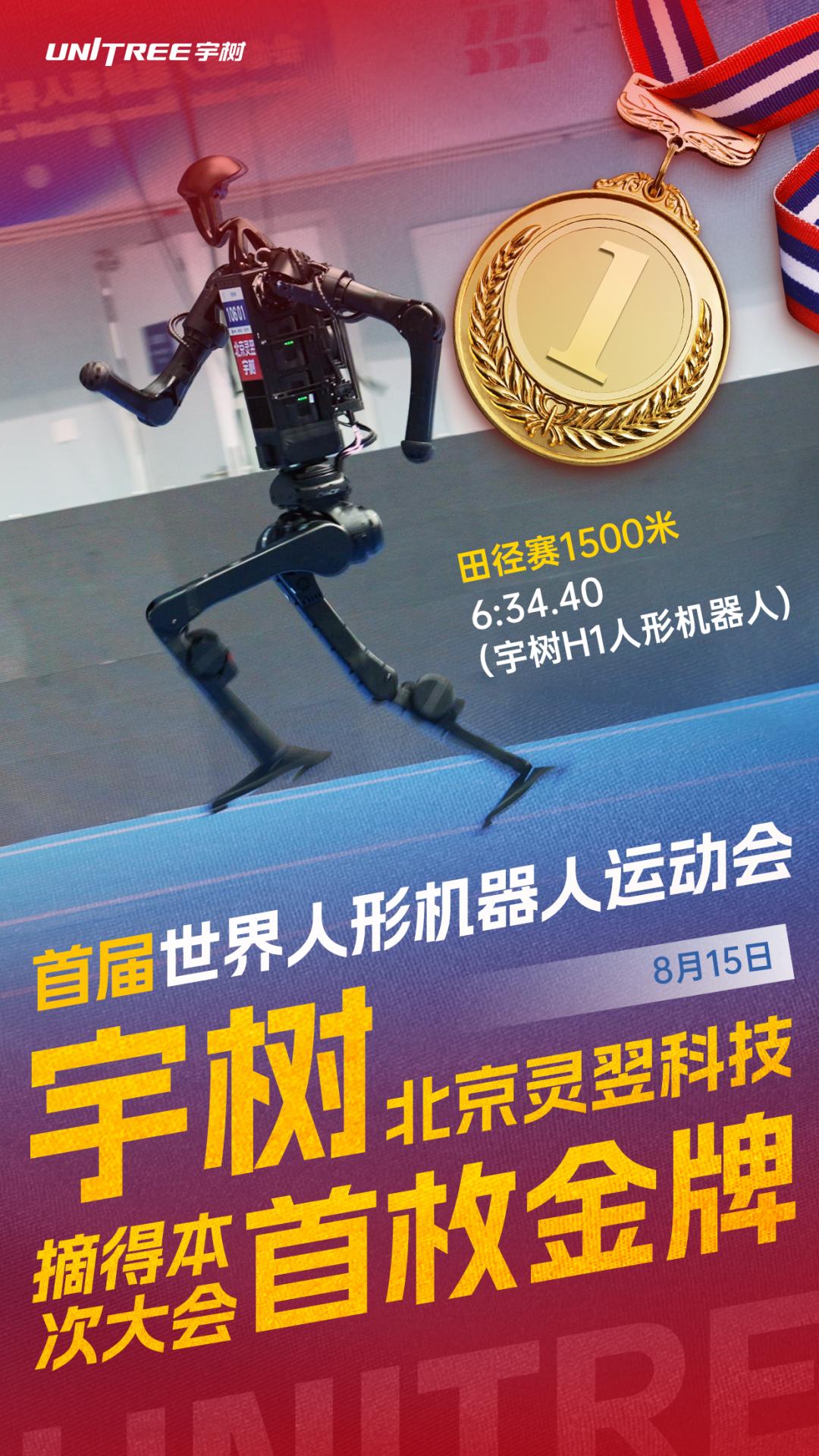
但是昨天宇樹機器人撞人后還拿了個1500米第一 , 摘得首屆人形機器人運動會的首金 。
這……真的是可以的嗎?
一片議論中 , 這場“事故”被反復分析 , 發現好像鍋——也不完全是機器人的 。
其實是人類出了問題昨天 , 宇樹機器人以6分34秒(人類世界紀錄為3分26秒)的成績取得1500米田徑第一名 , 系本次人形機器人運動會首金 , 也創造了世界紀錄 。
而且參賽過程中馬上要套圈對手了 , 它突然減速開始在場子里亂轉圈 , 主打一個凡爾賽 。
當然要論名場面 , 那還得是全網熱議的“撞人逃逸”事件 。
不過隨著列文虎克的上崗 , 這次事件的“元兇”也開始浮出水面——導致宇樹機器人撞人的 , 極有可能是人類 。
在撞擊發生的前一刻 , 剛好是兩名人類控制員交接遙控器的時間 , 兩人交接過程當中沒有注意到前面的人 , 未能及時發出避讓指令 。
有網友調侃說 , 這一定是一種擊敗對手的手段 。
畢竟高端的商戰 , 往往只需要采用最樸素的方式 。
不過有一說一 , 機器人比賽跑步 , 為啥需要遙控呢?
至于具體原因 , 一方面關于機器人自身的穩定性 , 主要是由于動態平衡問題 。 跑步是一種高度不穩定的運動方式 , 機器人必須在極短時間內完成身體姿態的調整 。
但是 , 現有的傳感器、算法和執行器的反應速度與精度還不足以在各種復雜地形上穩定應對 , 人工遙控能在機器人即將失衡時提供及時干預 。
比如宇樹的另一款機器人G1 , 今年4月就被第三方用來參加機器人半程馬拉松 , 在比賽過程中出現了摔倒的狀況 。
另一方面則是對環境感知不足 。 雖然傳感器可以提供環境信息 , 但在快速奔跑時 , 這些感知數據常常存在延遲或精度不足 , 機器人難以像人類一樣快速判斷 。 人工遙控能彌補機器人自主感知的不足 。
這次機器人只是短暫脫離遙控就發生撞人事件 , 也剛好說明了這一點 。
當然需要明確的是 , 機器人并非完全不能脫離遙控自主運動 , 比如這次1500米比賽的亞軍——北京人形機器人創新中心研發的天工Ultra機器人——在賽跑時就沒用遙控 。
△
包括這次“肇事”的宇樹H1(今年春晚上表演扭秧歌的同款) , 其實也具備一定的無遙控自主運動能力 。
H1是宇樹的首款通用人形機器人 , 誕生于2023年8月 。
它身高一米八 , 體重47公斤 , M107電機扭矩360牛·米 , 單腿和單臂分別擁有5個和4個自由度 , 感知層面則配備了3D激光雷達和深度相機 。
H1的移動速度3.3米每秒 , 潛在性能大于5米每秒(18公里每小時) , 本次比賽中的平均速度則是3.8米每秒 。
另外 , 回到機器人運動這個問題 , 是否需要進行遙控 , 也和具體的運動項目存在關聯 。
一些項目現階段更想體現機器人的運動能力 , 比如自由搏擊項目 , 也是人類操縱機器人出拳出腿 。
這個項目更加考驗機器人的重心是否合理 , 是否能在承受對手重擊后不倒地 。 背后涉及機器人腿部電機、關節等硬件部件的設計 。
以及人類控制也能讓進攻防守更靈活迅速 , 這樣同樣可以測試機器人在激烈對抗下的硬件性能 。
但是足球比賽項目就是完全機器人自主完成 , 這個項目可能更想測試機器人的策略判斷和協作能力 。
可以看到機器人踢球的動作幅度、靈活性都比較受限 , 摔倒的情況也時有發生 。
但是何時該出腳、何時該擋人防守、判斷誰是隊友誰是對手、怎么和隊友使用戰術 , 這些就都是機器人自主判斷了 。
而且在比賽中 , 機器人也能像人類一樣找回狀態 , 算法還是那一套 , 但是下半場表現就能比上半場更好 。
感覺人形機器人運動會的項目 , 更多還是考驗它們的單項能力 , 可能是“大腦”、可能是“四肢” 。
不過也別沮喪 , 人形機器人發展的速度遠超咱們想象 , 這不宇樹創始人、CEO王興興昨天在采訪中已經表示 , 下次比賽時要讓機器人選手自主奔跑 。
王興興:機器人犯錯時討論總是更多昨天在運動會現場 , 王興興圍觀了自家機器人比賽 。
對于拿金牌這事 , 他表示完全在意料之中 , 這次也不是宇樹H1取得的最好成績 , 沒有達到5米/秒的最高速度 。
這次好成績也讓他松了一口氣:前幾個月我們在網上被“黑”得實在受不了 。
同時還透露今年下半年、明年 , 宇樹機器人有更多突破 。
對于使用遙控這件事 , 王興興回應 , 宇樹的H1其實也具備了不用遙控器的能力 , 但因為策略不同 , 為追求速度 , 宇樹最后在賽場中仍然采用了遙控策略 。
這么做當然也有缺點 , “比較廢同事” , 操作員跟跑會體力嚴重透支 , 所以我們也看到現場操作員們需要接力陪伴機器人完成比賽 。
下次比賽我們肯定是全自主的 , 這并沒有難度 。
明年一定會參加北京亦莊半程馬拉松暨人形機器人半程馬拉松 。
在更早之前 , 王興興在采訪中也聊到了大眾格外關注機器人“闖禍”的問題 。
現在 , 機器人正常走路、跑步 , 關注比較少 。 但是如果機器人因為操作或者某種原因出點問題 , 討論就會爆多 。
我覺得每個人對新技術、新產品都還是要抱有更開放的心態 , 對于每個行業而言 , 多多少少都有起伏 , 我覺得包括我在內 , 大家應該更開放接受這些起伏 , 對它的未來抱有更大的信心和支持 。
【宇樹機器人“撞人逃逸”火到國外,王興興回應:下次不遙控了】參考鏈接:[1
https://www.reddit.com/r/singularity/comments/1mqywla/move_or_get_moved_unitree_h1/[2
https://www.reddit.com/r/singularity/comments/1mr4h4t/fuckin_clankers/[3
https://finance.sina.cn/stock/jdts/2025-08-15/detail-infmapwz2739811.d.html?vt=4cid=76993node_id=76993
推薦閱讀














- 笑死,人形機器人運動會全是鬼畜名場面,這鍋粥大家來趁亂喝了吧
- 小米16要上天?靈動島+澎湃OS3.0,雷軍的“蘋果夢”要成真了
- 世界人形機器人運動會物料搬運項目金牌誕生 領智戰隊奪冠
- 誰為 Data Agent “買單”?
- 能“超級瑪麗跳”,能跳近1.5米遠,還能跳街舞,冠軍機器人咋做到的
- 宇樹科技機器人包攬首日田徑賽金牌,王興興長舒口氣:我們之前被“黑”得受不了
- iPhone 17 系列:庫克的“刀法”與蘋果的精準布局
- 曝華為正測試“多分區多光譜影像”,多家廠商或將跟進
- 這個安卓品牌想搶在蘋果之前推出“iPhone 17 Air”
- 可“閉眼入”的華為手機!鴻蒙OS+RYYB主攝,512GB跌至3049元