文章圖片

文章圖片

文章圖片
文章圖片

文章圖片
文章圖片
衡宇 鷺羽 發自 凹非寺
量子位 | 公眾號 QbitAI
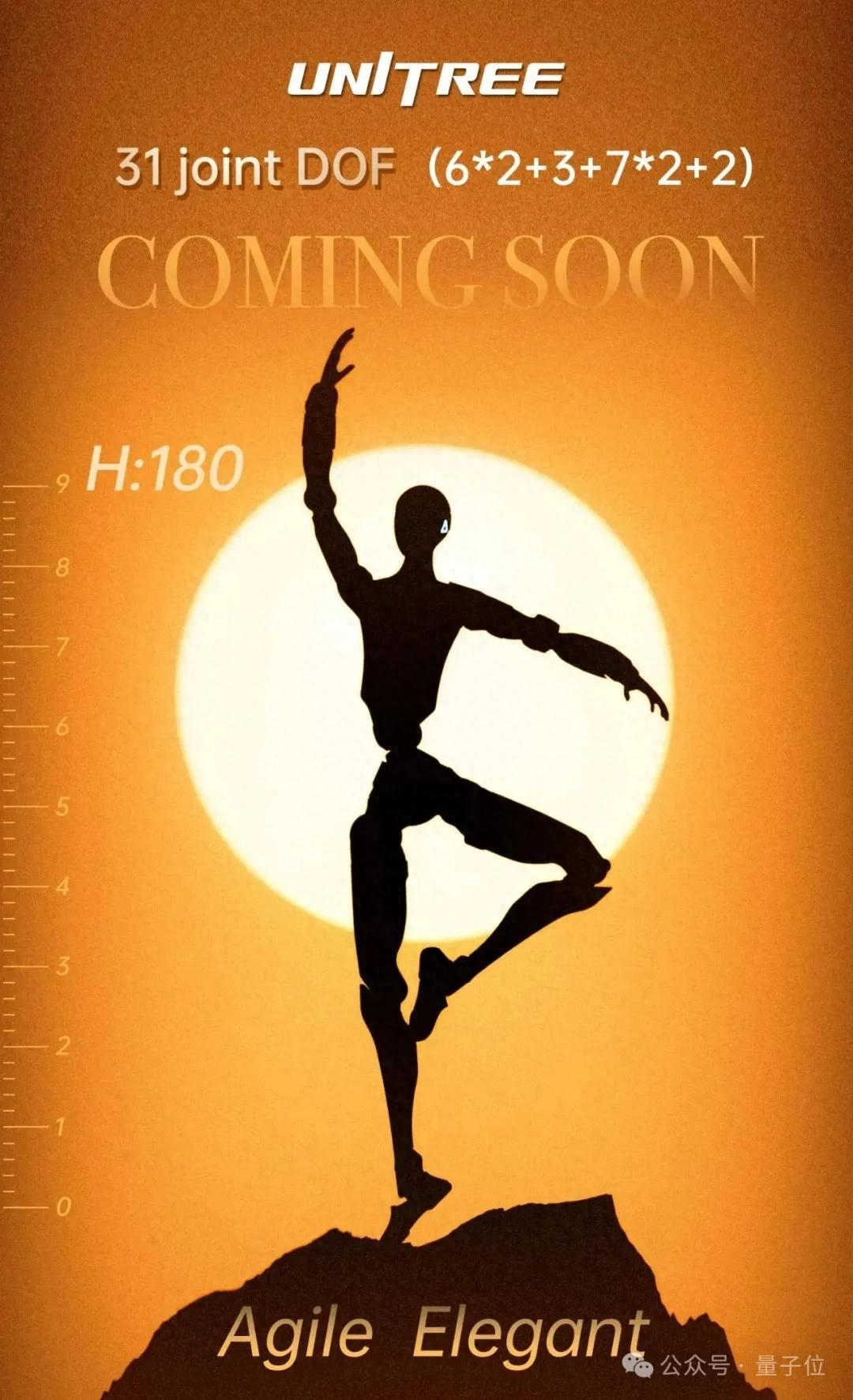
敏捷、優雅 。
宇樹用這兩個詞來形容自家最新人形機器人——
就在昨天 , 宇樹大晚上搞突襲 , 發布了下一款人形機器人的預熱海報 , 透露出部分關鍵信息 。
身高180 , 全身31個自由度 , 寬肩窄腰 , 體形纖長 。
因為踮起腳尖擺出芭蕾舞者的姿勢 , 還能看到它小腿擬人化的肌肉線條(跟腱部分還挺長) 。
海報左邊隱隱有一列尺子刻度 , 明示這位“芭蕾舞者”是妥妥的九!頭!身!
和最近紅遍網絡的成都世運會55歲的拉丁舞裁判“法拉利大叔”可以一比:
雖然只是“coming soon”的預告 , 但大家已經期待值拉滿了 。
咱們根據歷史來大膽預估一下——
宇樹上一款人形機器人Unitree R1智能伙伴 , 在5月30日發預告海報 ,7月25日正式發售 , 中間間隔不到2個月 。
如果還是按照這個速度 , 十月底應該就能見到這位“芭蕾舞者”的真面目了吧(開始原地許愿) 。
(注:為方便閱讀 , 下文皆昵稱宇樹此款待發布人形機器人為“芭蕾舞者”)
宇樹第四款人形機器人即將登場“芭蕾舞者”是宇樹繼H1、G1、R1之后 , 公開的第四款人形機器人 。
雖然具體細節還被藏得比較嚴實 , 但我們可以先回顧看看前面3款人形機器人的的基本信息:
在身高上 , 新品和H1都是180cm的大高個——宇樹的全尺寸(≥150cm)人形機器人家族終于再加一名新成員 。
從海報上定格的剪影來看 , “芭蕾舞者”在形態擬人化上 , 相比三款前作也有了不小的突破 , 整體來說更纖細、更流暢 , 無愧于官方強調的“優雅”一詞 。
又根據“優雅”這個關鍵詞 , 合理推測“芭蕾舞者”的應用定位 , 至少與同身高的H1“工業場景應用”不同 。
另一個突出變化是 , 新機型的自由度數量直接飆升到31個 。
自由度的提升 , 意味著機器人本體能有更加靈活的動作表現 。
再聯想到海報上的(為數不多的)關鍵詞之一是“敏捷” , 合理推測“芭蕾舞者”很有可能在速度方面超越前代最佳成績3.3m/s 。
雖然預告海報中尚未提及速度、負載等性能參數 , 但自由度的增加往往需要更強的動力系統支持 , 以及更強的運動控制算法來支撐本體協調運控 。
原地開個腦洞 , 下次宇樹再靠表演轟動一時 , 有沒有可能就是跳《四小天鵝》了?(期待臉)
至此 , 宇樹的人形機器人矩陣又拼上了一塊拼圖 。
折射出的背后信息 , 是宇樹正在將旗下人形機器人細分到更精細的領域——就像宇樹旗下機器狗也有不同尺寸、不同功能定位 。
目前看來 , 宇樹的人形機器人版圖已經呈現出這樣的情況:
所有人形機器人產品尺寸全面 , 既有全尺寸 , 也有半尺寸 。
同一尺寸下細分為工業應用、科研開發、娛樂互動等不同定位 。
同一機型還提供從基礎版到高端版的梯度選擇 。
同時 , 著重toB方向的全尺寸機器人持續在探新的應用場景 , 著重toC方向的半尺寸機型則不斷下探價格門檻 。
綜上種種 , 我愿稱之為“全尺寸+全場景+全價位”的戰略布局 , 你可以說是宇樹技術積累的產品化展示 , 也可以說是宇樹推動自家機器人市場占有率的野心 。
看看宇樹人和宇樹狗的發展進化圖 , 一種yesterday once more的感覺涌上心頭 。
人形機器人市場 , “芭蕾舞者”是啥水平?盡管海報上信息寥寥 , 但如今人形機器人扎堆亮相 , 根據已知信息 , 宇樹將發布的這位“芭蕾舞者”到底是個啥水平?
我們從身高和自由度兩個方面來看 。
身高宇樹預熱的這款“芭蕾舞者” , 官方信息是身高180cm 。
這在人形機器人里不是最頂的——
相比最近這一波具身智能涌現出的人形機器人 , 早年的人形出現過好幾款天空樹 。 這一定程度上也與當時的硬件制造水平有關 。
歷史第一高:約200cm , 日本早稻田大學1972年推出的WABOT-1 。 歷史第二高:188cm , 波士頓動力2009年亮相的Atlas第一代原型機 。 歷史第三高:約187cm , NASA在2013年發布的Valkyrie , 以及Engineered Arts設計的Ameca 。 歷史第四高:182cm , 日本產業技術綜合研究所(AIST)2018年開發的AIST HRP-5P 。
目前公開資料顯示 , 182cm再往下 , 就是180cm這條線了 。
不管是早期還是現在 , 包括宇樹的H1和“芭蕾舞者”、小鵬Xpeng Iron、天工Ultra在內 , 很多人形機器人都背后團隊被安排上了這個身高 。
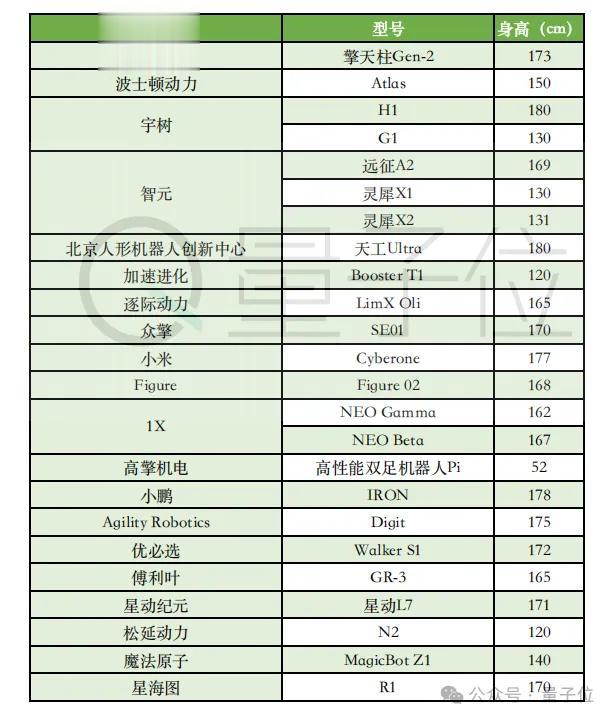
我們也盤點整理了部分熱門雙足人形機器人的身高 , 大家可以感受一下硅基生物們的“發育”情況:
同時 , 180cm也是這一波具身智能浪潮里 , 人形機器人身高目前的天花板 。
所以 , 雖然“芭蕾舞者”不是史上最高 , 但無論時間線拉多長 , 180cm的身高都能入選人形機器人的高個行列 。
自由度整理后可以看到 , “芭蕾舞者”的自由度是宇樹目前四款人形機器人(基礎版)里最多的 。
表格中 , 我們將新機型的“6x2+3+7x2+2” , 分別對應為腿、腰、臂、頸的自由度數量 , 供大家對比參考 。
之所以如此推測 , 一是根據R1預告海報中的先例 , 宇樹習慣將腿的自由度數量放在第一位;二是宇樹H1的升級版H1-2的配置 , 自由度數量分別是單腿6個、單臂7個、腰部3個、頸部2個 。
(若與最終官方數據不匹配 , 我們將第一時間修訂)
31個自由度 , 意味著“芭蕾舞者”較同身高的H1提升了63% 。
它主要增加了手臂和腰部的自由度數量 , 使“芭蕾舞者”上肢的冗余運動能力幾乎媲美人類 。
不過 , 本體31個自由度放到整個全尺寸人形機器人市場來看 , 并不是最高 。
全尺寸人形機器人中 , 全球最高自由度機型是中興通訊與天鏈機器人聯合推出的天鏈T1 Pro , 身高160cm , 全身共81個自由度 (71個主動+10個被動) 。
不過這個數量包含了兩只靈巧手 , 每只分別15個自由度 。
那么就算不算上靈巧手的自由度 , 天鏈T1 Pro本體也擁有51個自由度 。
但天鏈T1 Pro的自由度數量 , 在人形機器人屬于是一騎絕塵的存在 。
緊接其后的第二梯隊 , 自由度數量幾乎穩定在30個上下(拋開靈巧手自由度數量) 。
“芭蕾舞者”就屬于第二梯隊中的一員 。
且宇樹其它全尺寸人形機器人產品 , 如G1 EDU和R1 EDU的滿配版 , H1升級后的H1-2 , 自由度數量也在此區間內(未計算靈巧手自由度數量在內) 。
放眼其它品牌的全尺寸人形機器人選手 , 自由度數量在此區間內的包括但不限于:
小鵬的Iron:32個自由度(未計算靈巧手自由度數量在內)智元機器人的靈犀X2探索版:31個自由度逐際動力的LimX Oli:31個自由度星動紀元的星動L7:31個自由度(未計算靈巧手自由度數量在內)特斯拉的擎天柱:30個自由度優必選的Walker S1:29個自由度(未計算靈巧手自由度數量在內)智元機器人的遠征A2-MAX:29個自由度(未計算靈巧手自由度數量在內)……
再下一個梯隊 , 自由度數量就在10-30個區間了 。
以及有一個自由度界的特殊例子——
波蘭公司Clone Robotics去年年底發布的的ProtoClone 。
它幾乎1:1復刻人體解剖結構 , 僅是上半身(含靈巧手24個自由度/只)就有164個自由度 。
今年2月 , 該公司又以視頻形式展示過全身 。
前方高能預警:
由于不知其具體尺寸 , 以及未公布下半身自由度 , 不知道該歸如何歸類 , 暫且放在最后大家看個熱鬧吧~
One More Thing王興興今年數次公開發言中透露過 , 宇樹早年反對做人形 , 他自己也并不堅持一定要走人形條路 。
直到ChatGPT出現 , 公司才正式啟動人形機器人項目 。
雖然宇樹春晚舞蹈驚艷全國 , 最近在WAIC、WRC上頻繁表演格斗 , 但“我們非常重視讓機器人干活” 。
就在前幾天WRC期間 , 王興興接受采訪時大方表示自己觀點:
我認為當未來機器人真正能大量干活時 , 國家完全可以跟企業說每臺機器人出廠就得收稅 。 比如一臺機器人是干什么活 , 它產生的價值里面有多少稅直接上交給國家 , 我覺得完全是可以的 。
這個思維方式和思考高度 , 倒是讓人想起了另一位以人口經濟學聞名的科技創業者——攜程創始人梁建章 。
不同的是梁建章呼吁多生育促進經濟 , 王興興希望讓更多機器人干更多活納稅 。
都是造人 , 都鼓勵造更多人 , 管它碳基還是硅基 , 殊途同歸 。
是吧?
參考鏈接:[1
https://mp.weixin.qq.com/s/w0DKW2whIskRPDiqx9tI6w
— 完 —
量子位 QbitAI
關注我們 , 第一時間獲知前沿科技動態
【宇樹180芭蕾機器人,究竟啥水平?】
推薦閱讀










- 螞蟻數科向全球開源180萬深度偽造定位數據集,助力AI算法可解釋
- 機器人“百米飛人”決戰,天工奪冠!相關負責人致敬宇樹科技:他們非常厲害
- 4x100米接力復賽決出四強,宇樹科技、天工等晉級
- 宇樹機器人“撞人逃逸”火到國外,王興興回應:下次不遙控了
- 宇樹科技機器人包攬首日田徑賽金牌,王興興長舒口氣:我們之前被“黑”得受不了
- 宇樹機器人決定再戰田徑場!
- 1800億OPPO,焦慮求變
- 宇樹押“狗”,智元押“人”
- 宇樹王興興最新演講:數據不是具身智能的最大挑戰
- 寶通科技:必和必拓采購其與宇樹科技二次開發的四足及二足機器人